変形型月面ロボットLEV-2搭載用電源基板の開発
お知らせ
2024年1月25日付けでJAXA殿が公開したプレスリリースです。
記事へのリンク
LEV-2が撮影した画像です。

概要
- 打ち上げ日:2023年9月7日
- 打ち上げ機:H-IIAロケット47号機
- ミッション:SLIMおよびその周辺の撮影
- 開発箇所:電源回路開発、バッテリアセンブリ、モータアセンブリ、ケーブル製作
開発内容
JAXAらが実施する変形型月面ロボットLEV-2(正式名称:Lunar Excursion Vehicle 2、愛称:SORA-Q、以下SORA-Qと明記)の開発において、バッテリから制御基板・モータ・カメラ等へ電源を供給するための、電源基板を開発しました。
SORA-Qは、コンパクトな筐体の中にさまざまな機能を搭載しているため、とにかく小型化が必要となります。
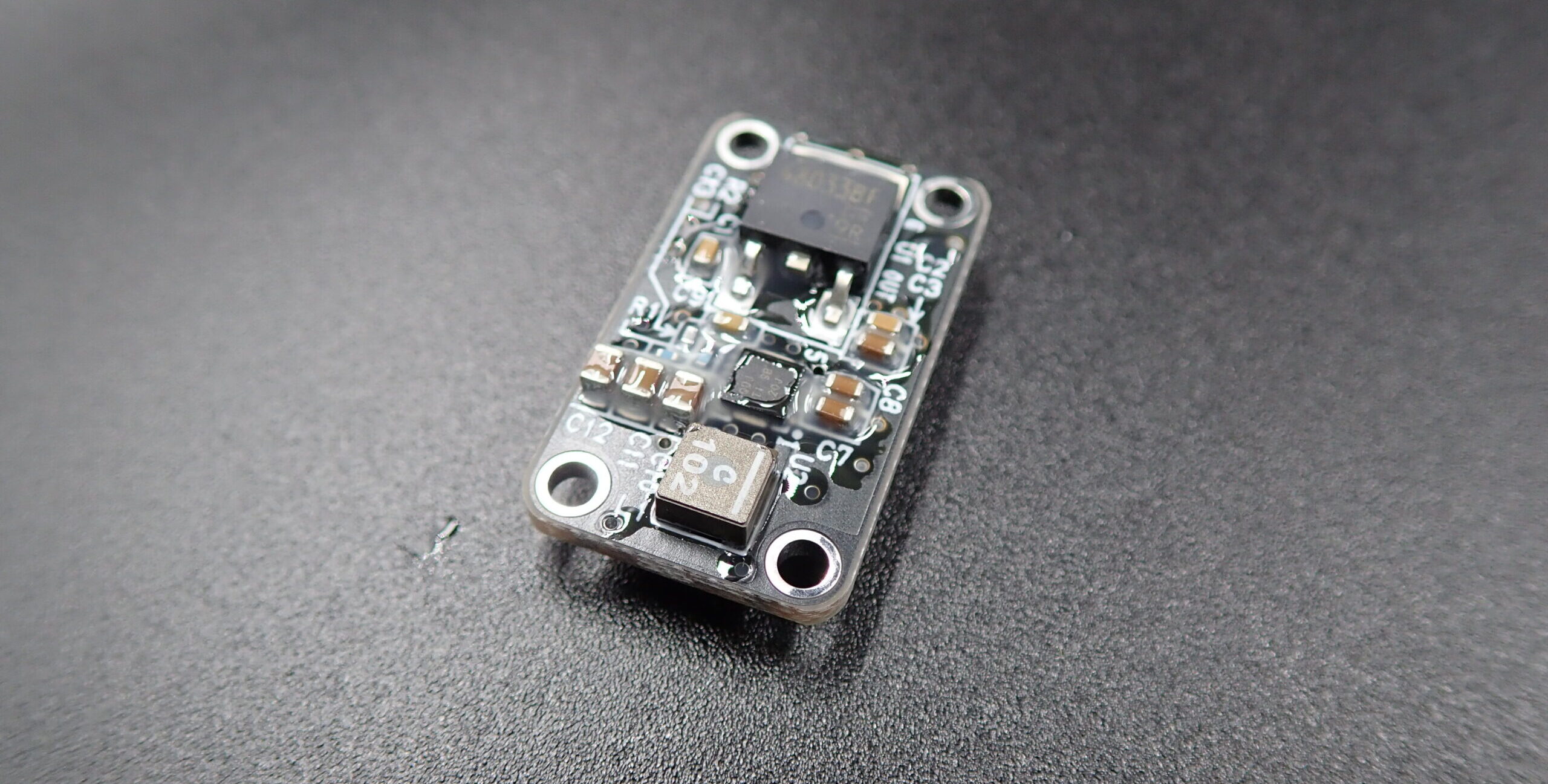
今回開発した電源基板は、26mm×15mmと、これまでにウェルリサーチで開発してきた電源基板の中で最も小型なものとなりました。
小さな基板の上に、必要な電圧を生成する回路、モータドライバ、各装置間を接続するためのコネクタ・・・と、さまざまな部品を配置しています。
また、SORA-Qのバッテリおよびモータの配線、そして電源基板と各装置を接続するためのケーブル製作も実施しました。
省スペースに収めるため、使用した線材もとても細く、直径がわずか0.4mm。
普段は使用しない細さでしたが、打上時の振動や月面の環境にも耐え、丈夫な線材でした。
SORA-Qが、これまでにウェルリサーチが開発に携わった装置の中で、はじめての月面着陸となりました。
今後も、月面をはじめとして、さまざまな環境下で活躍する装置の開発に携わっていきたいと思います。