DELIGHT
概要 現在ウェルリサーチは、JAXAが実施するHTV-X1号機搭載「DELIGHT」の開発に携わっています。DELIGHTの詳細については、JAXA...

宇宙機システム及び装置の設計・解析・技術支援
ブログ
概要 現在ウェルリサーチは、JAXAが実施するHTV-X1号機搭載「DELIGHT」の開発に携わっています。DELIGHTの詳細については、JAXA...
[:ja] お知らせ 2021年10月22日付けのプレスリリースです。 記事へのリンク 概要 実験期間:2021年8月27日...

お知らせ 2020年11月10日付けのプレスリリースです。 記事へのリンク 2020年5月18日付けのプレスリリースです。 記事へのリンク 概要 打...
お知らせ 2020年4月23日付けのSOLISSのプレスリリースです。 記事へのリンク 2019年7月29日付けのSOLISSのプレスリリースです。...

概要 打ち上げ日:2014年12月3日 打ち上げロケット:H-IIAロケット26号機 ステータス:運用中 開発箇所:小型カメラ(CAM-C, CAM...

概要 打ち上げ日:2019年1月18日 打ち上げロケット:イプシロンロケット4号機 ミッション:1メートル四方の膜展開 ステータス:運用中 開発箇所...

概要 打ち上げ日:2016年夏 打ち上げロケット:不明 ステータス:運用中 開発箇所:温調器コントローラ ギャラリー
[:ja] 概要 打ち上げ日:2014年5月24日 打ち上げロケット:H-IIAロケット24号機 ステータス:運用中 開発箇所:AISアンテナ [:...
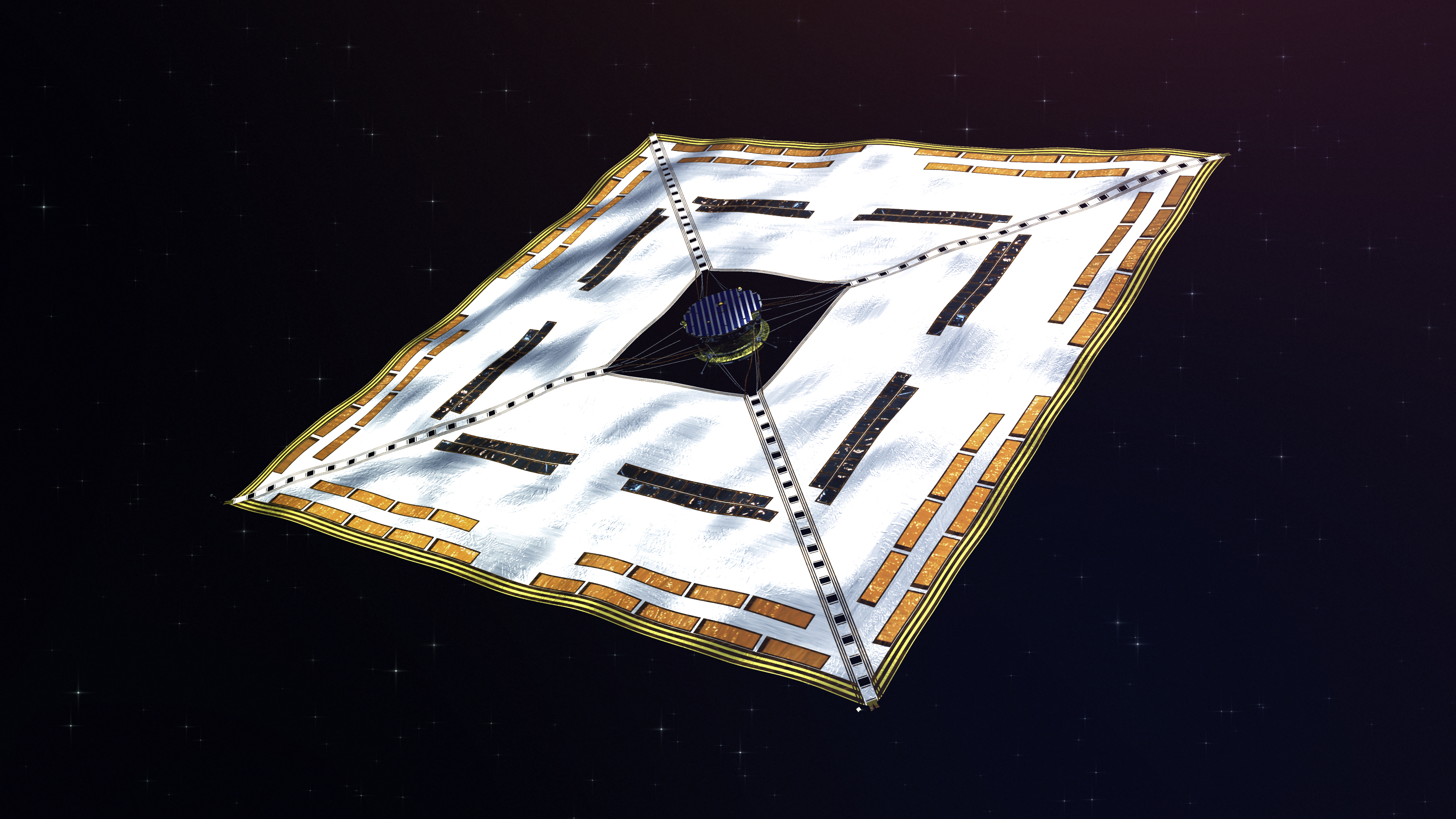
[:ja] 概要 打ち上げ日:2010年5月21日 打ち上げロケット:H-IIAロケット17号機 ステータス:運用終了 開発箇所:構造・機構、モータ...
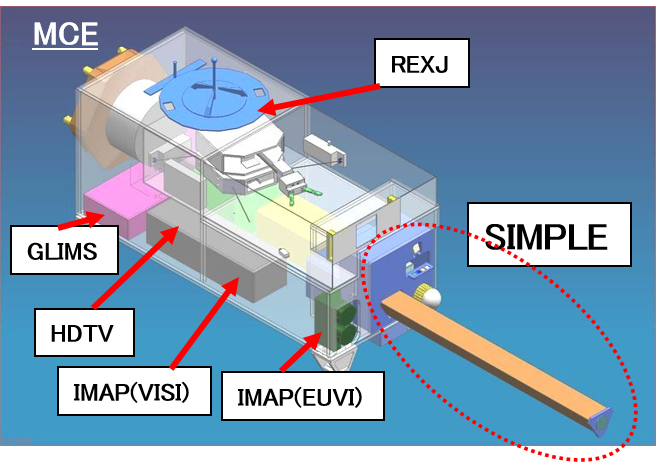
[:ja] 概要 打ち上げ日:2012年7月21日 打ち上げロケット:不明 ステータス:運用終了 開発箇所:システム全体、構造、伸展機構、電源装置(...